Recent: Repointing Ansel Adams Ubik Fashion Nautilus Shard Betty Boop Dance Reading List 2024 Ready for 2025 Shuttle Computer Abstract Arcs Election Night RCS Photos Space Stamps Fireworks Long Black Curly Eyes Nixie Tubes Memory Scavengers Nightshade Cobras Magical Feedback of Oz |
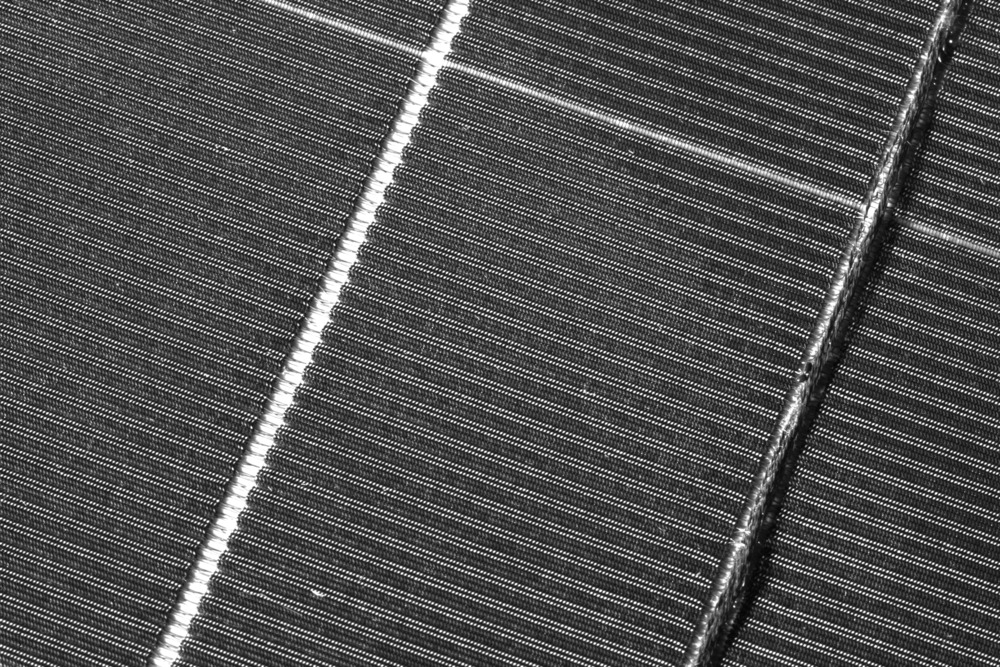
This one is mono: there's no color filter over the sensor. It's been really
great doing real B&W photography for the first time since my high school
darkroom days.
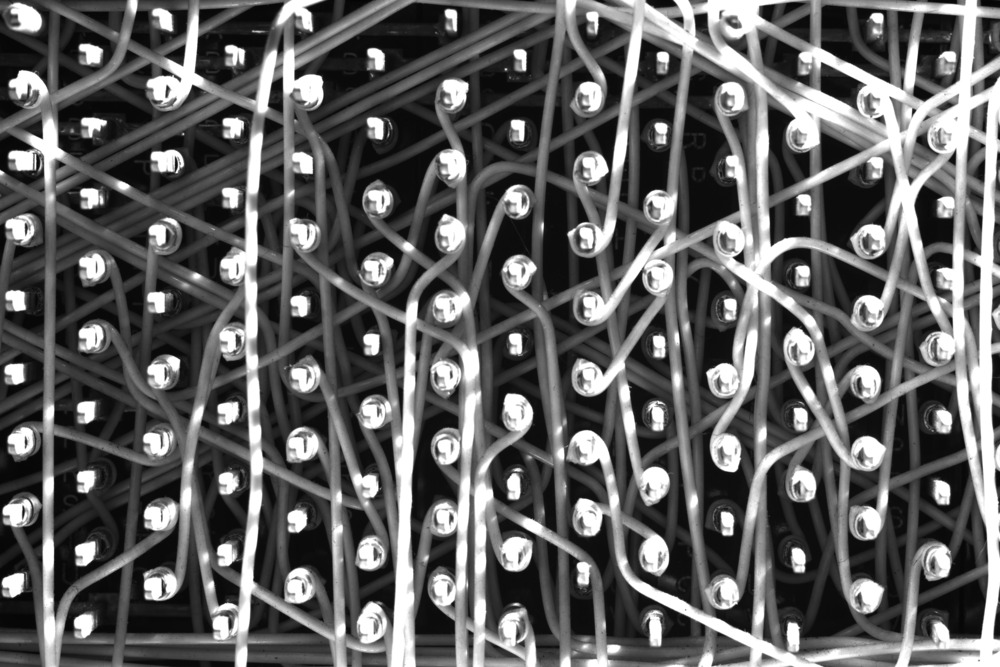
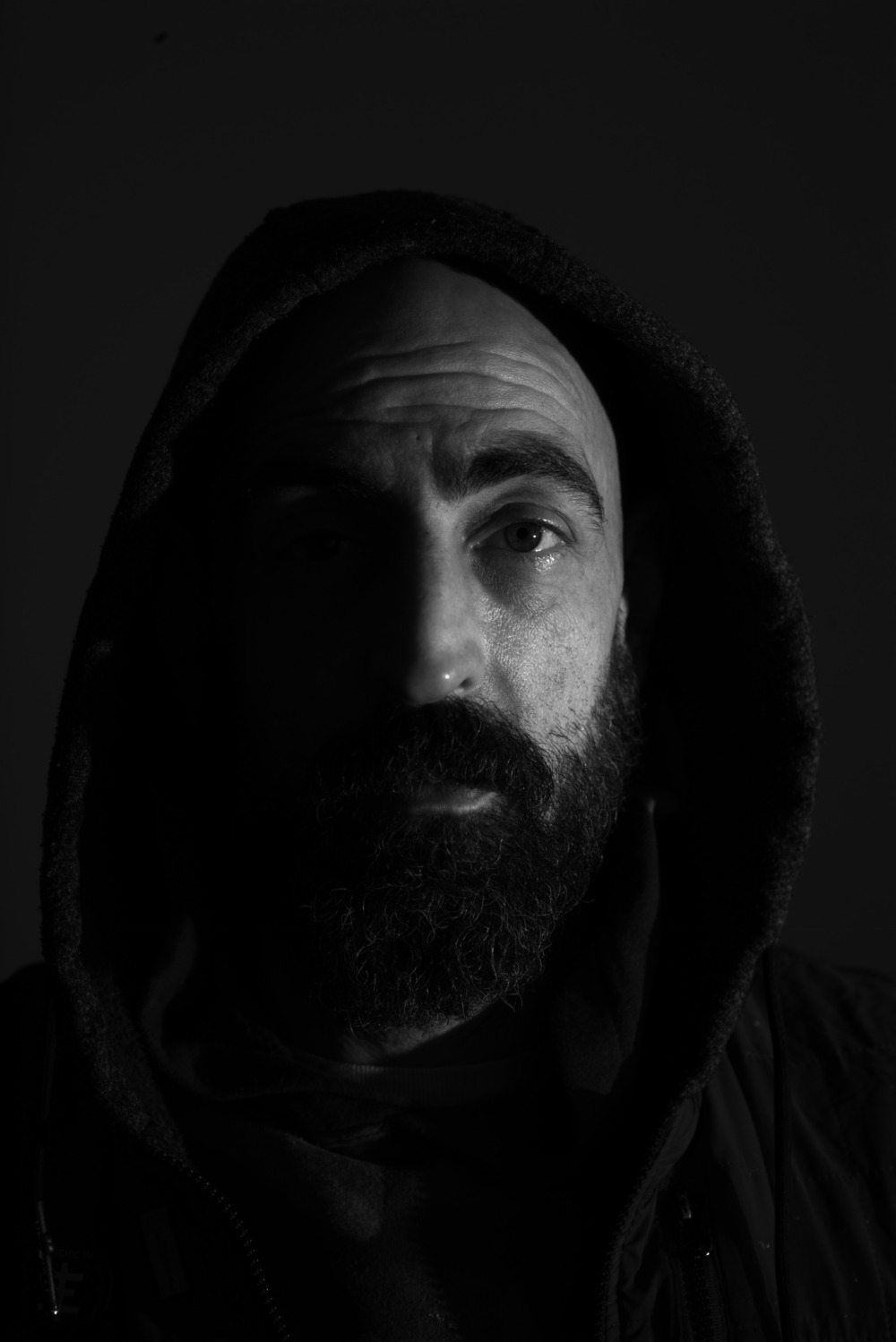
These are some photos I've taken with it (mostly with a Micro-Nikkor 105mm
AIS lens):
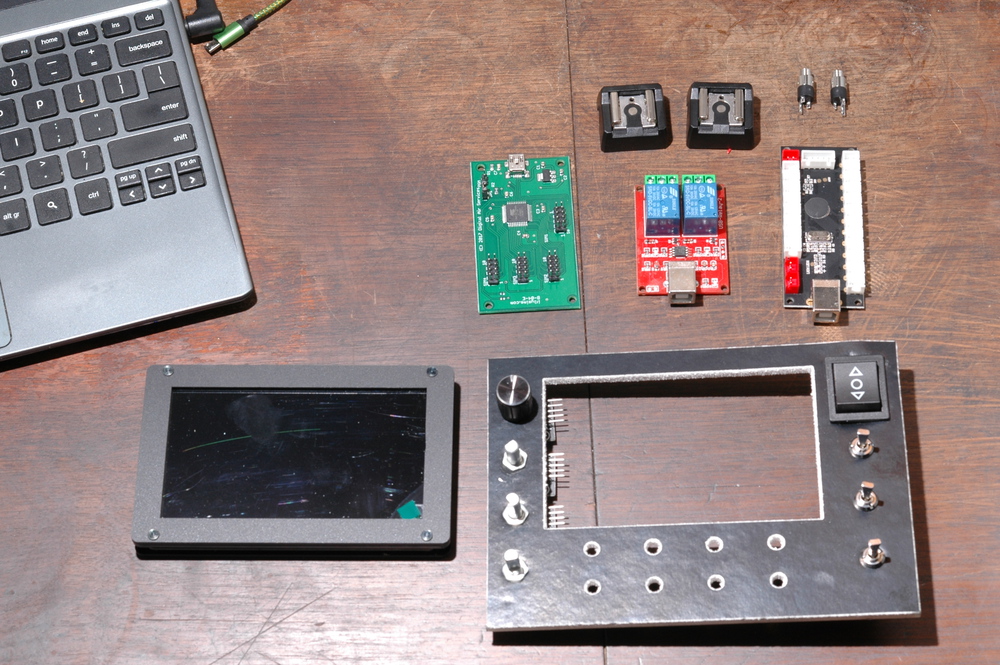
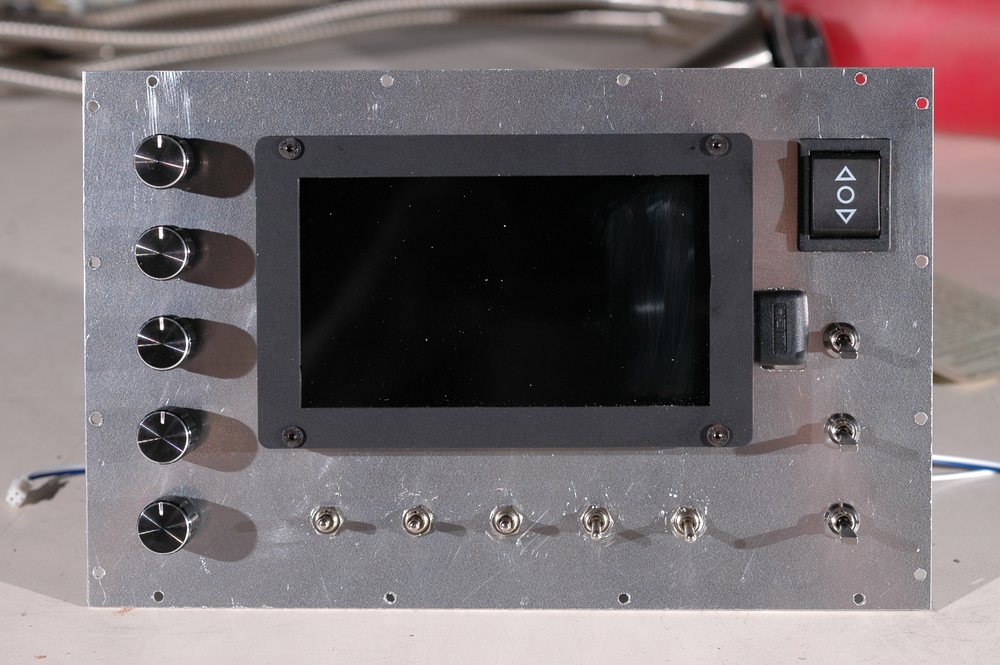
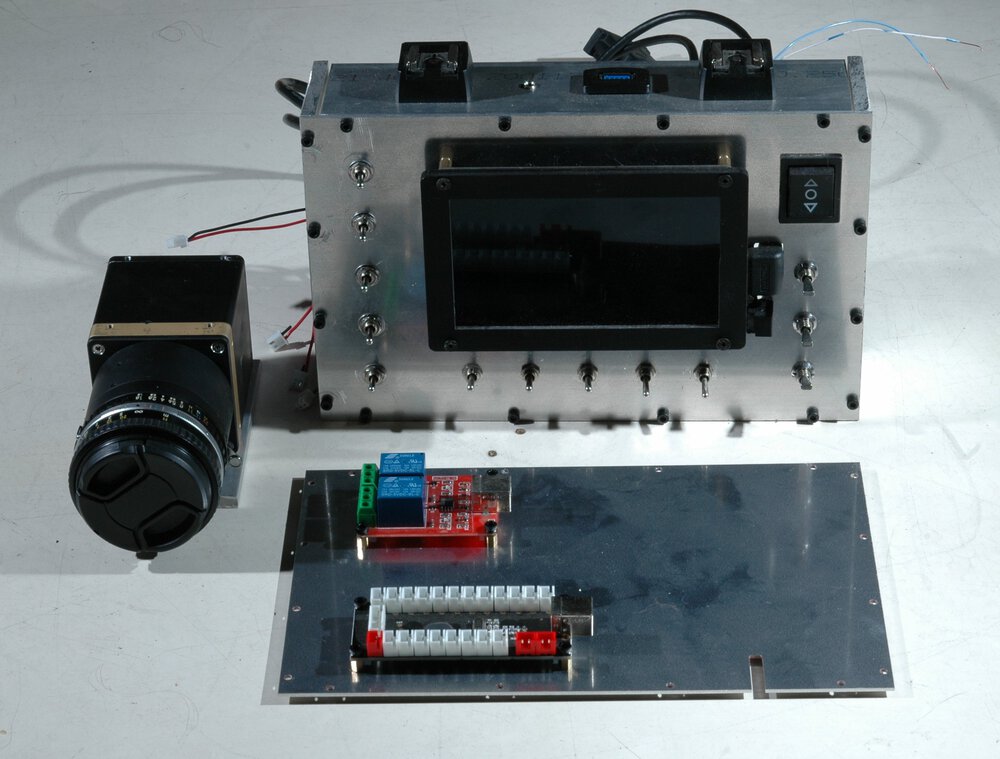
And this is my homemade UI box, starting with the original foamcore mockup.
(Did you know there are HDMI LCD screens on the market that don't
work with X? Dammit. So I'm temporarily using an old droid as my viewfinder
until I find a replacement LCD.)
The switches on the left are: shutter speed (coarse), shutter speed (fine),
shutter delay, variable select, variable set. Switches on the right are
shutter (full / thumb), focus assist, guidelines, resolution. Switches
on the bottom row are: restart/quit, move photos to fileserver / thumb drive,
status info, flash control.
Most of it's functioning already. Guidelines are just bitmap files I
write in postscript - you can define a bunch, but the two I've been using
are crosshairs & grid, for centering & aligning.
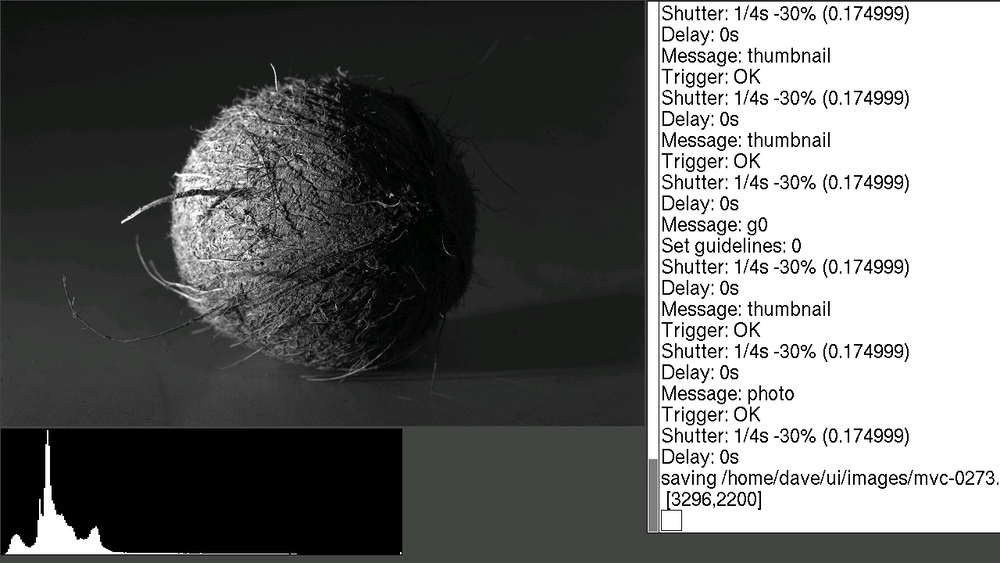
A screenshot of the viewfinder. Thumbnail, histogram, status info
(currently including a lot of extra debugging info).
|